






機械手為什么要減速機?
機械手能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。它可代替人的繁重勞動以提升生產的機械化和自動化,能在有害環境下操作以保護人身安全,因而廣泛應用于機械制造、智能物流、智慧倉儲、自動化生產線和工業機器人設備等行業中。
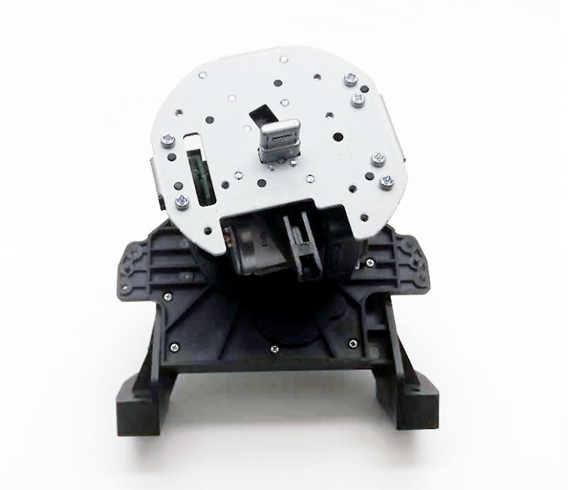
機械手主要由手部和運動機構組成。手部是用來抓持工件(或工具)的部件,根據被抓持物件的形狀、尺寸、重量、材料和作業要求而有多種結構形式,如夾持型、托持型和吸附型等。運動機構,使手部完成各種轉動(擺動)、移動或復合運動來提升規定的動作,改變被抓持物件的位置和姿勢。運動機構的升降、伸縮、旋轉等獨立運動方式;機械手為什么要用減速機,主要考慮有如下三點作用:
1.獲得低轉速,獲得大轉矩,獲得更好的運行特性。
2.加了減速機可以降低轉動慣量,一般是速比的平方降低,這對于控制來說很重要,能及時的控制起停、變速。通過減速機增大了扭矩也就相當于增大了輸入功率,能減小輸入電機所需的功率(在需要調速的場合),一般情況電機要比減速機昂貴,所以考慮要采用減速機,比如機械手驅動系統。
3.減速機在驅動中有保護電機的作用,運行中減速機承受較大扭矩,過載時傳遞到電機只有過載量除以減速比的數值,若直接由電機承擔可能會引起電機的損壞。在過載非常大的時候減速機會先被損壞,而減速機只需要更換備件就可以恢復使用,費用相對較低,如果電機直接損壞維修相對較慢,費用也高。
機械手的設計普遍要求達到重量輕,體積小,扭力大(承載能力大),驅動平穩,反應靈活,穩定性好,安全性高等需求,機械手關節減速器一般需由大驅動比,大扭矩,高扭矩剛度、小回差、易于裝配、體積小,重量輕等一些特點。
機械手專用行星減速機能提高閉環精度,更好的控制控制環路。由于有個50:1的大減速比,機械手減速機出軸受到擾動傳遞到電機端就比直驅縮減了37dB,使得閉環精度在減速機出軸顯得更高。同時轉子等效的轉動慣量提高到了2500倍,使得控制環路的滯后環節受轉子慣量占主導,而轉子由于直接受電磁力的驅動從而沒有由于剛度造成的扭矩滯后,比直驅要好控。
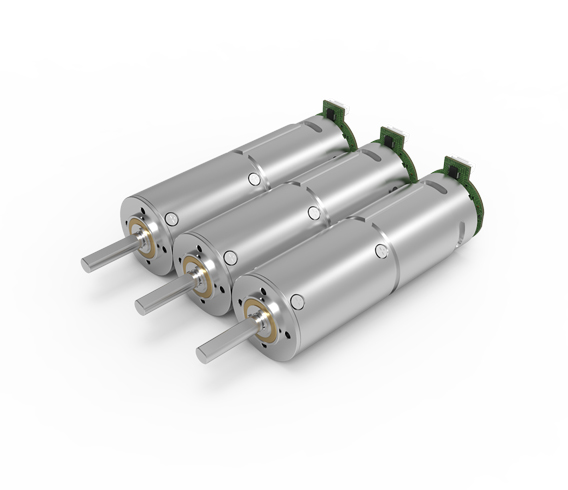
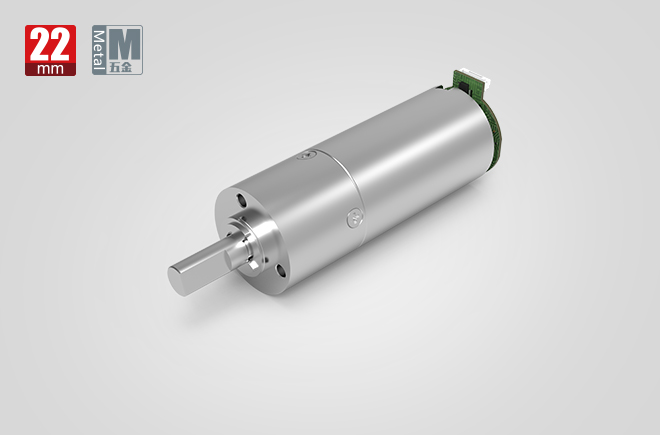
機械手可以采用行星減速機、直流有刷減速機、直流無刷減速機、步進減速機、空心杯減速機以及RV減速機、諧波減速機作為驅動減速電機,技術參數、性能特點等需求可以根據應用行業場景定制。